The Shape of Locomotion:
A Method for Large Scale Analyses of Intra-Limb Coordination
In September 2019, I had the chance to join the yearly conference of the German Zoological Society. I very much enjoyed the event and met a lot of interesting people, many of whom I only knew by their excellent publications.
Because there was a sattelite symposium on new methods in locomotor research (“Form and function of motion systems: new approaches, new opportunities, new challenges”), which is precisely my area of interest, I decided to promote my upcoming manuscript:
Mielke, F., Van Ginneken, C., and Aerts, P. (2019).
Quantifying intralimb coordination of terrestrial ungulates with Fourier Coefficient Affine Superimposition.
Zoological Journal of the Linnean Society.
https://doi.org/10.1093/zoolinnean/zlz135
Thanks to Egon Heiss, Tom Weihmann, and Ellen Schulz-Kornas for organizing this successful sattelite meeting, which I hope will be repeated in the future.
Below you will find an approximate recording of my talk.
Slides:

You can download the slideshow here.
Video:
I recorded a practice talk, which should be approximately similar to the talk at the conference.
The video is also available on odysee.
Thank you to all the FunMorph lab members who kindly attended, and to all the scientists and fellow students who gave feedback before that!
Code:
In the presentation, I used a python tool to illustrate the properties of Fourier Series.
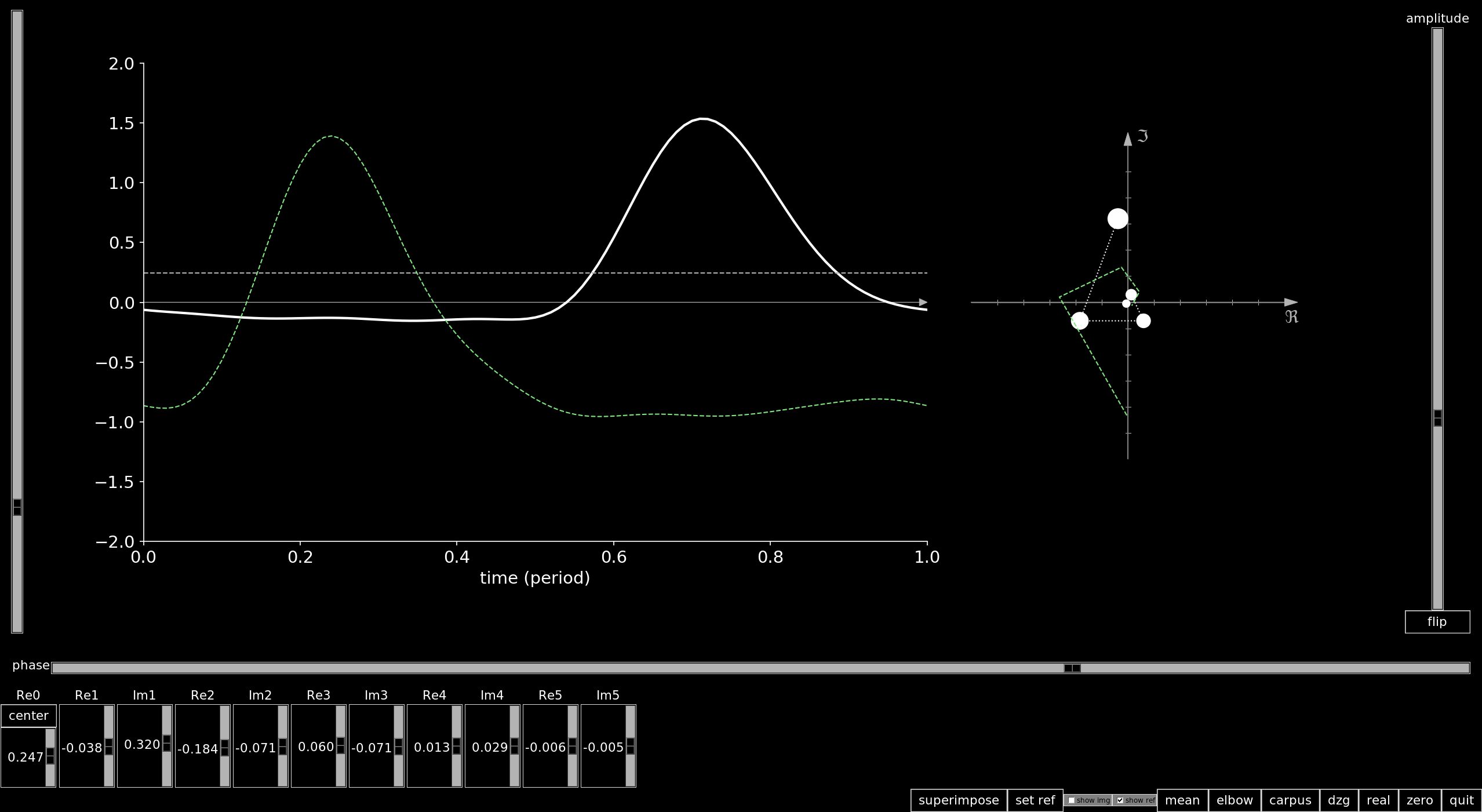
It contains two plots of the same function, once in the time domain, once in the frequency domain. These are linked. Sliders can be used to change Fourier coefficients and affine components. Superimposition of different signals is possible.
The tool can be downloaded here: here
Abstract:
This is the original abstract I submitted (half a year before the talk). Since the talk was restricted to 15 minutes, I had to leave out the part about ungulates and rather focused just on explaining the method of Fourier Coefficient Affine Superimposition.
Coordinated movements of body segments can be considered the collective output of the movement apparatus and its control, which varies with evolutionary, ontogenetic, and immediate context. However, when comparing the inter-segmental coordination of closely related taxa, it may be hard to pinpoint and quantify the exact manifestation of this variation, especially if large numbers of groups are under investigation. Limitations stem from the complex interrelation of morphology, posture, and adjacent joints (Gatesy and Pollard, 2011, J. Theor. Biol. 282(1):7). In consequence, the kinematic study of coordination disposes of a more restricted computational toolbox than for example geometric morphometrics, although both fields are equally data driven. I present a novel quantitative method that overcomes these limitations. The method exploits the potential of the Fourier Series to isolate affine components (i.e. mean, amplitude, phase) of signals. By removing affine components to superimpose joint angle profiles, one receives measures of the shape of angular profiles, analogous to procedures in geometric morphometrics. I exemplify this on a data set that covers 75% of all genera of terrestrial ungulates. It has been known that ungulate locomotion is affected by geometric dissimilarity (the classical rhino-giraffe comparison). It can be shown that an even stronger, non-morphological variability component is associated with clearance, i.e. how animals adjust or adapt to substrate structure. This novel method enables the derivation and test of alternative hypotheses about intra-limb coordination in unprecedented phylogenetic detail and scale, thereby improving the understanding of the biomechanical and evolutionary principles that shape locomotion.
Thank you for your interest.
As always, any questions and feedback are welcome. (falkmielke.biology@mailbox.org)